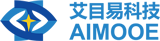
手术机器人教学系统主要由艾目易自研的Aimposition光学定位系统和手术机器人教学系统软件,搭配机械臂、教学配套计算机与教学台共同组成,利用近红外光定位技术、图像处理、空间配准、虚拟现实等核心技术,实现了三维可视化、图像分割、空间配准、精准定位、实时导航、机械臂操控等功能。

· 影像导入:支持CT/MRI/CBCT等影像数据导入与处理,实现三维可视化或图像分割的效果。
· 术前规划:术前在二维面上先选取靶点(运动终点),再选取进针点(运动起点),完成手术路径规划。
· 手术注册:支持手术器械注册以及患者注册,自动注册时间<5s,实现物理空间和图像空间的配准。
· 手术导航:实时导航,全程跟踪显示手术路径,确保按规划路径运动。
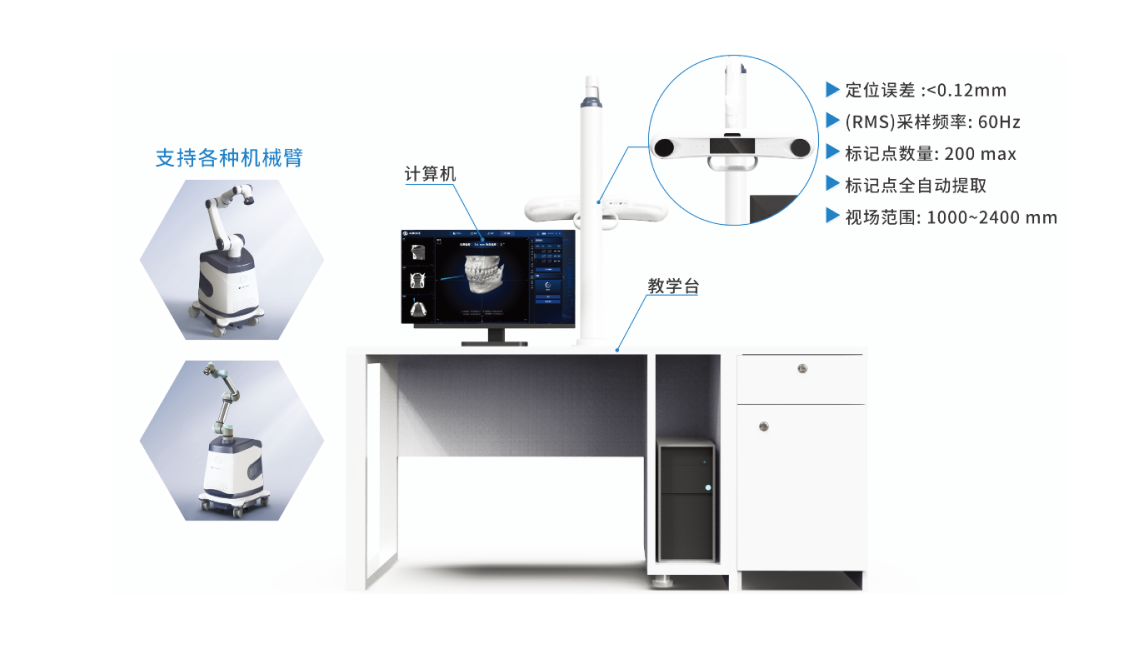
配套教学实验手册和相关教学工具,以“理论+实操”一体化教学模式,以实验案例驱动教学,激发学生学习兴趣,加强专业技能培养,
使学生系统掌握Aimposition光学定位系统、机械臂、手术机器人教学系统软件、Hololens设备的基本操作,以及手术机器人的整体操作流程。