基于图像处理、手术导航、机器人柔性控制等核心技术开发神外手术机器人软件,医生术前在软件进行手术路径规划,
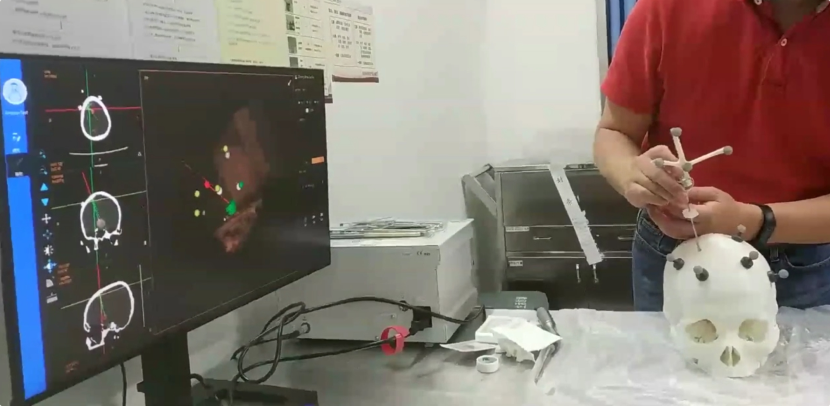
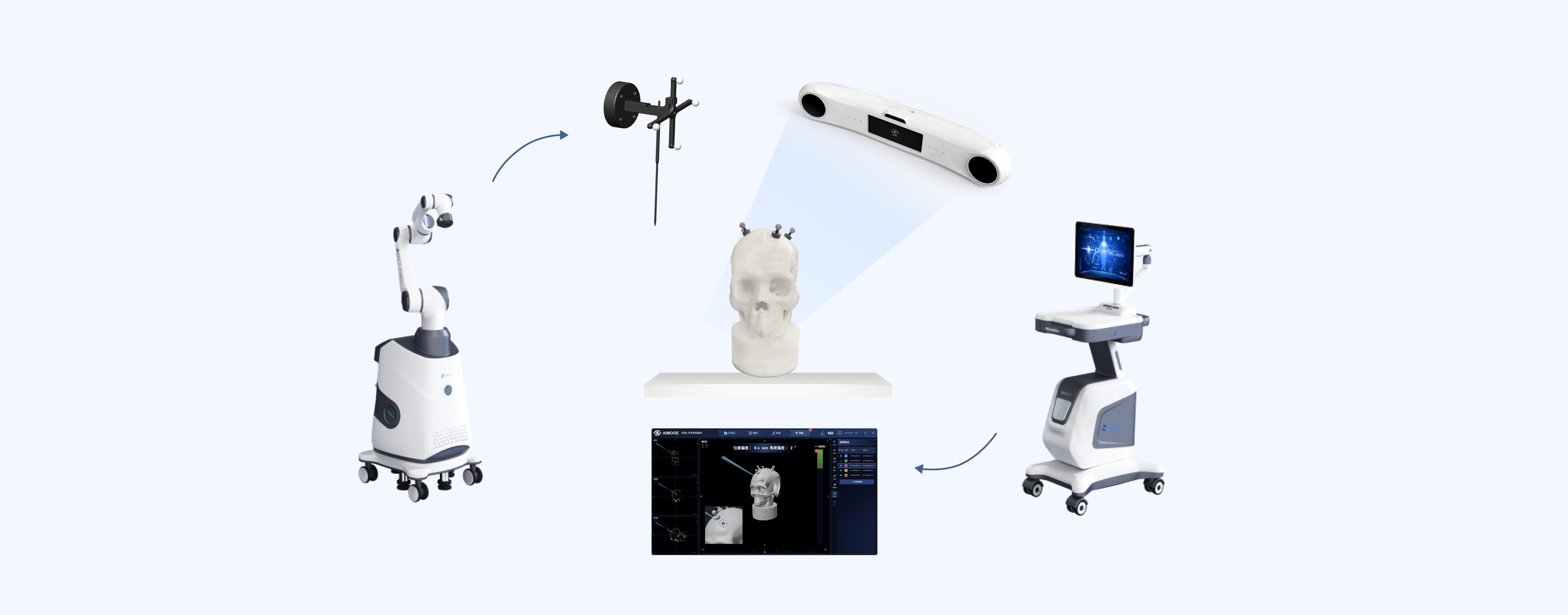
结合AimPosition光学定位系统、机械臂以及定制化光学定位工具,可实时计算手术路径并导航,
辅助医生完成各类神外手术,可应用于颅内活检、颅内抽吸引流等手术场景。
· 光学定位系统实时跟踪患者头部固定的标记点;
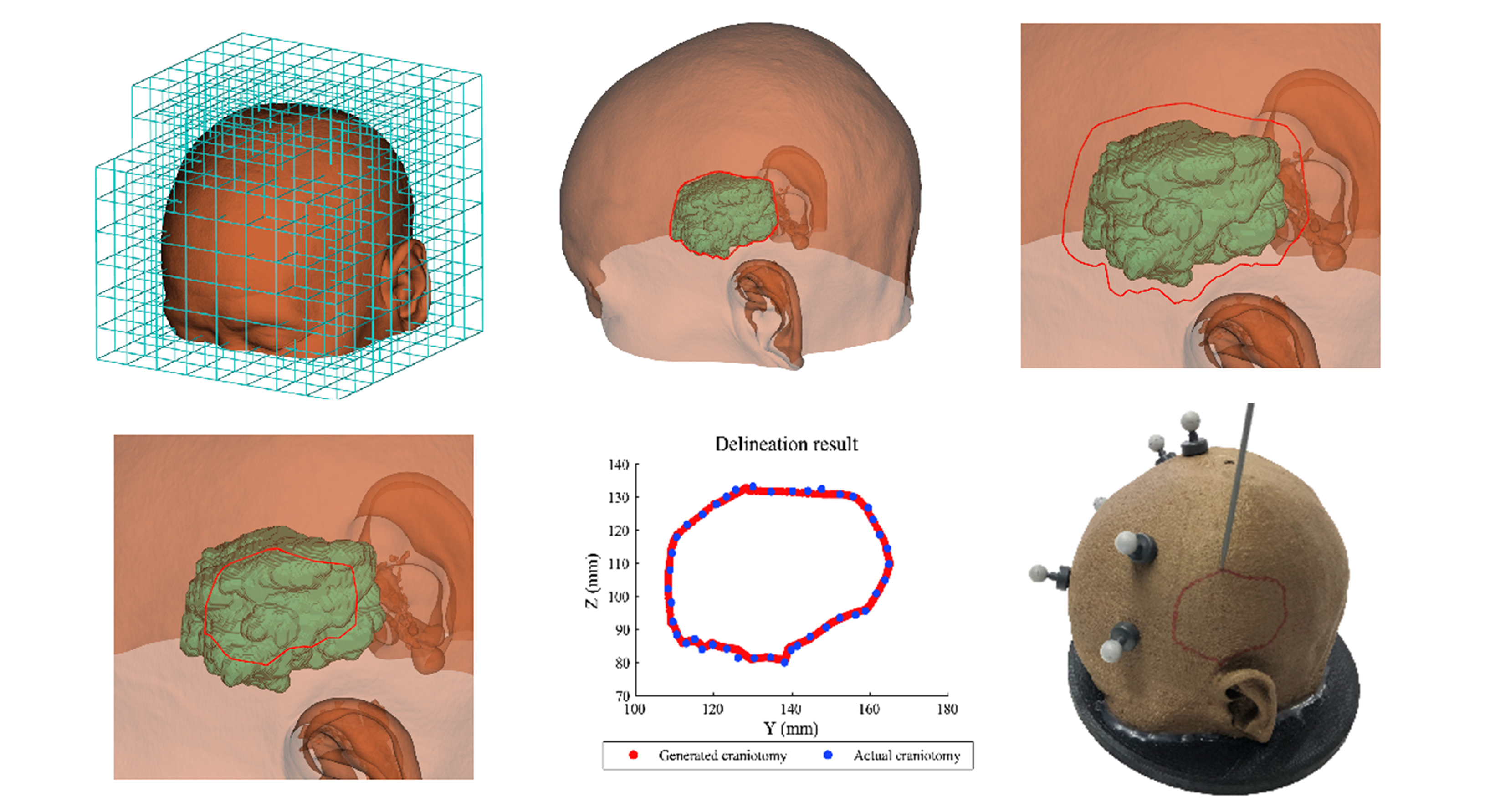
· 通过深度学习算法处理脑部CT、MRI等影像数据,可实现三维可视化,脑部病灶自动分割、多模态图像配准或融合;
· 术前医生在软件上规划手术路径;
· 通过实时的手术路径计算机械臂的位姿信息,结合机械臂力反馈、拖拽导航等柔性控制技术,辅助医生实现颅内活检、颅内抽吸引流等手术。